HarmonyOS系统中内核实现三轴加速度检测方法
大家好,今天主要和大家聊一聊,如何使用鸿蒙系统读取三轴加速度的方法。

目录
第一:三轴加速速基本原理
第二:E53_SC2中API分析
第三:硬件设计
第四:软件设计
第五:编译调试
第六:运行结果
第一:三轴加速速基本原理
在加速度传感器中有一种是三轴加速度传感器,同样的它是基于加速度的基本原理去实现工作的,加速度是个空间矢量,一方面,要准确了解物体的运动状态,必须测得其三个坐标轴上的分量;另一方面,在预先不知道物体运动方向的场合下,只有应用三轴加速度传感器来检测加速度信号。由于三轴加速度传感器也是基于重力原理的,因此用三轴加速度传感器可以实现双轴正负90度或双轴0-360度的倾角,通过校正后期精度要高于双轴加速度传感器大于测量角度为60度的情况。
目前的三轴加速度传感器大多采用压阻式、压电式和电容式工作原理,产生的加速度正比于电阻、电压和电容的变化,通过相应的放大和滤波电路进行采集。这个和普通的加速度传感器是基于同样的原理,所以在一定的技术上三个单轴就可以变成一个三轴。对于多数的传感器应用来看,两轴的加速度传感器已经能满足多数应用。但是有些方面的应用还是集中在三轴加速度传感器中例如在数采设备,贵重资产监测,碰撞监测,测量建筑物振动,风机,风力涡轮机和其他敏感的大型结构振动。
第二:E53_SC2中API分析
使用以下API完成三轴加速度的读取
E53_SC2_Init()
void E53_SC2_Init(void)功能描述:初始化E53_SC2_Init(void)
E53_SC2_Read_Data()
float E53_SC2_Read_Data(void)功能描述:读取三轴加速度及温度
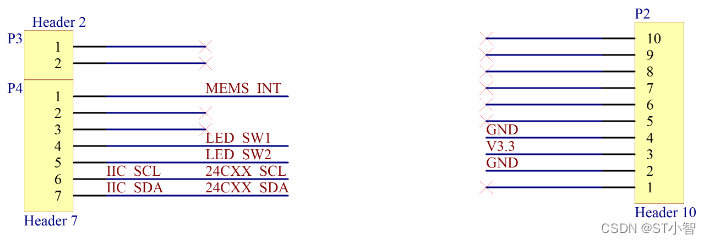
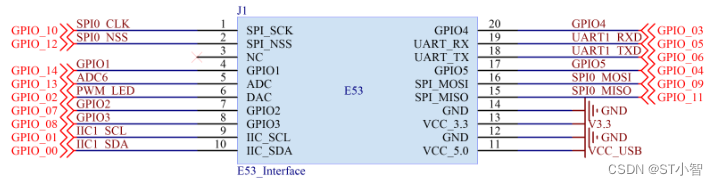
第三:硬件设计
本示例使用鸿蒙开发板,其中原理图如下,三轴加速度传感器MPU6050是通过I2C来驱动的。
第四:软件设计
首先调用 E53_SC2_Init() 函数初始化E53_SC2所接的引脚的功能,然后循环调用E53_SC2_Read_Data()函数读取三轴加速度并通过串口打印出来,设置第一次读出的三轴加速度为水平状态,当倾斜开发板后会点亮扩展板上倾斜状态的灯。
static void Example_Task(void){ E53_SC2_Init(); while(1) { printf("=======================================\r\n"); printf("*************E53_SC2_example***********\r\n"); printf("=======================================\r\n"); E53_SC2_Read_Data(); printf("\r\n******************************Temperature is %d\r\n", (int)E53_SC2_Data.Temperature); printf("\r\n******************************Accel[0] is %d\r\n", (int)E53_SC2_Data.Accel[0]); printf("\r\n******************************Accel[1] is %d\r\n", (int)E53_SC2_Data.Accel[1]); printf("\r\n******************************Accel[2] is %d\r\n", (int)E53_SC2_Data.Accel[2]); if( X == 0 && Y == 0 && Z == 0) { X = (int)E53_SC2_Data.Accel[0]; Y = (int)E53_SC2_Data.Accel[1]; Z = (int)E53_SC2_Data.Accel[2]; } else { if(X+100E53_SC2_Data.Accel[0]||Y+100E53_SC2_Data.Accel[1]||Z+100E53_SC2_Data.Accel[2]) { LED_D1_StatusSet(OFF); LED_D2_StatusSet(ON); } else { LED_D1_StatusSet(ON); LED_D2_StatusSet(OFF); } } usleep(1000000); }}第五:编译调试
修改BUILD.gn文件
修改applications\BearPi\BearPi-HM_Nano\sample路径下 BUILD.gn 文件,指定 e53_sc2_example 参与编译。
#"C1_e53_sf1_mq2:e53_sf1_example",#"C2_e53_ia1_temp_humi_pls:e53_ia1_example",#"C3_e53_sc1_pls:e53_sc1_example","C4_e53_sc2_axis:e53_sc2_example",#"C5_e53_is1_infrared:e53_is1_example",第六:运行结果
实例代码编译烧录后,按下开发板的RESET按键,通过串口助手查看日志,会打印温度和三轴加速度信息。当倾斜开发板后会点亮扩展板上倾斜的灯。
=======================================*************E53_SC2_example***********=======================================******************************Temperature is 25******************************Accel[0] is 45******************************Accel[1] is 3******************************Accel[2] is 2089=======================================*************E53_SC2_example***********=======================================******************************Temperature is 25******************************Accel[0] is 49******************************Accel[1] is 5******************************Accel[2] is 2087
